华金证券指出,华为智能驾驶的算法架构从人工标注到自主决策,由有图转向无图;车辆识物从BEV到GOD,从人工标注到自主决策。
BEV(Bird’s Eye View)鸟瞰图技术是智能驾驶感知算法中的一种重要方式,它能基于多传感器数据融合,通常是利用摄像头等传感器采集到的图像信息,经过处理和分析后,将车辆周围的环境以鸟瞰的视角呈现出来,让车辆对周围的道路、车辆、障碍物等有一个整体的空间感知。
根据华金证券,华为ADS1.0主要采用的就是BEV+Transformer算法,Transformer是一种新型神经网络架构,可以直接进行2D、3D不同序列之间的转换。整个BEV+Transformer方案的思路基本为“输入-提取-转换-融合-时序-输出”,可将多传感器采集到的数据融合并展现在同一坐标中,形成一个虚拟的向量空间,所有的分析和决策都在这个空间中进行。但 BEV 对异形障碍物和一些不规则物体的识别存在一定局限性,难以精准识别和判断那些不在其预设模型和标注范围内的物体。并且在开发阶段,该算法依赖 “白名单机制”,需要人工对识别到的目标进行标注。然而,实际路况极为复杂,障碍物标识存在 “长尾效应”。像石块、树木这类不在白名单中的物体不仅数量众多,而且种类繁杂,这就导致智能驾驶系统可能因无法识别这些物体而发生事故。
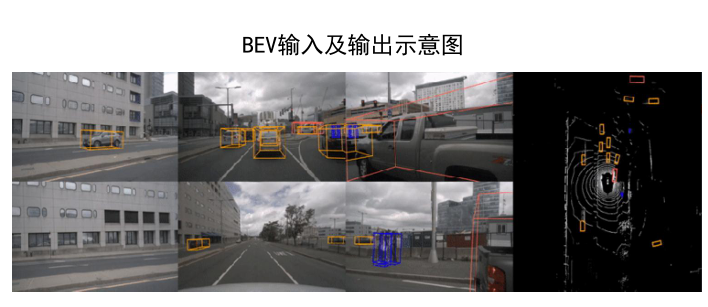
图:BEV输入及输出示意图(图源:华金证券)
“识路”:从有图到无图,采用RCR实现车辆的正常行驶
在智能驾驶领域,精准 “识路” 一直是核心关键。早期,智能驾驶依赖高精地图,犹如为车辆配备一份精确的 “导航蓝图”,车辆凭借地图中的详细道路信息,如车道位置、交通标识位置等,实现相对稳定的行驶。高精地图就像一位经验丰富的向导,为车辆在行驶过程中提供各种细节指引,帮助车辆提前规划路线,避开潜在危险。
但高精地图存在诸多局限性。它的制作和维护成本极高,需要大量人力、物力投入,要不断更新以匹配道路的动态变化,像道路施工、临时交通管制等情况,地图更新往往存在滞后性。而且,高精地图覆盖范围有限,在一些偏远地区或新修建道路,可能无法提供有效的数据支持。
为突破困境,华为智能驾驶引入了 RCR(Road Cognition & Reasoning,道路认知与推理)技术,实现从有图到无图的跨越。RCR 技术让车辆依靠自身搭载的传感器,如摄像头、毫米波雷达、激光雷达等,对周围环境进行实时感知和理解。通过先进的算法,车辆能够自主识别道路特征、车道线、交通标识以及其他车辆和行人等,如同人类驾驶员凭借眼睛观察路况来做出驾驶决策。
在实际应用中,当车辆行驶在没有高精地图覆盖的道路上时,RCR 技术发挥重要作用。传感器持续收集周围环境信息,传输给车辆的智能驾驶系统,系统快速分析处理这些数据,判断车辆当前位置、行驶方向以及与周边物体的相对位置关系,从而规划出合理的行驶路径,确保车辆正常行驶。
据悉,华为的智能驾驶技术已经得到了广泛应用。例如,2024年2月,华为OAIT推出了“无图NCA”(Navigation Control Assistant)功能,这一功能使得车辆能够在不依赖高精度地图的情况下进行城市驾驶辅助。目前,这一功能已经在中国大陆的338个城市得到了支持。
华为预测到2030年,其智能驾驶算法将实现超过99%的通用目标检测准确率。此外,华为将继续优化其智能驾驶技术,通过云计算和AI集群训练,不断提升系统的性能和用户体验。
总之,华为智能驾驶技术从依赖高精度地图到实现无图导航的转变,体现了其在自动驾驶领域的强大技术实力和创新能力。通过RCR技术,华为不仅提升了车辆的感知和决策能力,还为未来的智能驾驶发展奠定了坚实的基础。
相关阅读: